
Page 69 - Física Tippens: Conceptos y Aplicaciones, Séptima Edición Revisada
P. 69
50 Capítulo 3 Mediciones técnicas y vectores
Tierra y los cuerpos que atrae. El peso es una cantidad vectorial dirigida hacia el centro del
planeta.
La unidad de fuerza en el sistema internacional es el newton (N), el cual se definirá de
forma adecuada más adelante. Conviene señalar que su relación con la libra es:
1 N = 0.225 Ib 1 Ib = 4.45 N
Una mujer que pesa 120 Ib tiene una equivalencia de 534 N. Si el peso de una llave inglesa
es 20 N, pesará unas 4.5 Ib en unidades del SUEU. Mientras no llegue el día en que todas las
industrias hayan adoptado íntegramente las unidades del SI, la libra seguirá usándose, y con
frecuencia será necesario realizar conversiones de unidades. Aquí se utilizarán ambas unida
des de fuerza al trabajar con cantidades de vectores.
Dos de los efectos producidos por las fuerzas que pueden medirse son: (1) cambiar las
dimensiones o la forma de un cuerpo y (2) cambiar el movimiento del cuerpo. Si en el primer
caso no hay un desplazamiento resultante de dicho cuerpo, la fuerza que causa el cambio
de forma se llama fuerza estática. Si una fuerza cambia el movimiento del cuerpo se llama
fuerza dinámica. Ambos tipos de fuerzas se representan convenientemente por medio de
vectores, como en el ejemplo 3.4.
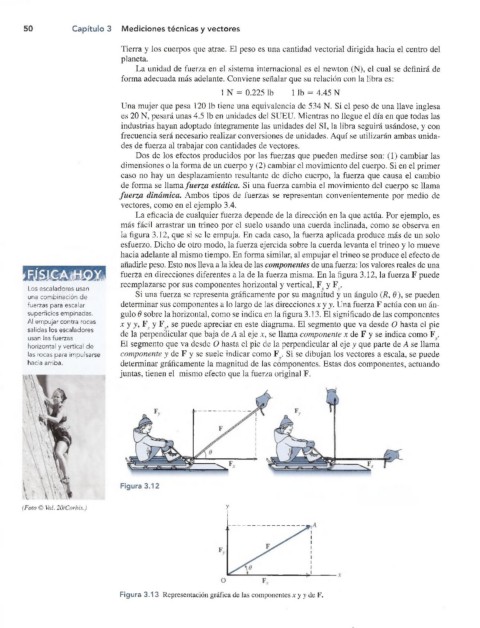
La eficacia de cualquier fuerza depende de la dirección en la que actúa. Por ejemplo, es
más fácil arrastrar un trineo por el suelo usando una cuerda inclinada, como se observa en
la figura 3.12, que si se le empuja. En cada caso, la fuerza aplicada produce más de un solo
esfuerzo. Dicho de otro modo, la fuerza ejercida sobre la cuerda levanta el trineo y lo mueve
hacia adelante al mismo tiempo. En forma similar, al empujar el trineo se produce el efecto de
añadirle peso. Esto nos lleva a la idea de las componentes de una fuerza: los valores reales de una
fuerza en direcciones diferentes a la de la fuerza misma. En la figura 3.12, la fuerza F puede
reemplazarse por sus componentes horizontal y vertical, Fr y F .
Los escaladores usan
una combinación de Si una fuerza se representa gráficamente por su magnitud y un ángulo (R, 0), se pueden
fuerzas para escalar determinar sus componentes a lo largo de las direcciones x y y. Una fuerza F actúa con un án
superficies empinadas. gulo d sobre la horizontal, como se indica en la figura 3.13. El significado de las componentes
Al empujar contra rocas x y y> Fv y F,, se puede apreciar en este diagrama. El segmento que va desde O hasta el pie
salidas los escaladores de la perpendicular que baja de A al eje x, se llama componente x de F y se indica como F .
usan las fuerzas
horizontal y vertical de El segmento que va desde O hasta el pie de la perpendicular al eje y que parte de A se llama
las rocas para impulsarse componente y de F y se suele indicar como F,. Si se dibujan los vectores a escala, se puede
hacia arriba. determinar gráficamente la magnitud de las componentes. Estas dos componentes, actuando
juntas, tienen el mismo efecto que la fuerza original F.
(Foto © Vol. 20/Corbis.) y
Figura 3.13 Representación gráfica de las componentes x y y de F.