
Page 240 - Física Tippens: Conceptos y Aplicaciones, Séptima Edición Revisada
P. 240
11.1 Desplazamiento angular 221
Objetivos
Cuando termine de estudiar este capítulo el alumno:
1. Definirá el desplazamiento angular, la velocidad angular y la aceleración angu
lar, y aplicará estos conceptos a la resolución de problemas físicos.
2. Ofrecerá analogías que relacionen los parámetros del movimiento rotacional (9,
a, a) con los parámetros del movimiento rectilíneo, y resolverá problemas de ace
leración angular de una manera parecida a lo que se aprendió en el capítulo 6, la
resolución de problemas sobre aceleración tangencial (consulte la tabla 11.1).
3. Escribirá y aplicará las relaciones entre la rapidez o aceleración lineal y la rapi
dez o aceleración angulares.
4. Definirá el momento de inercia de un cuerpo y describirá en qué forma pue
den utilizarse esta cantidad y la rapidez angular para calcular la energía cinéti
ca rotacional.
5. Aplicará los conceptos de la segunda ley de Newton, trabajo rotacional, po
tencia rotacional y cantidad de movimiento angular a la resolución de proble
mas físicos.
Se ha considerado únicamente el movimiento traslacional, en el que la posición de un objeto
cambia a lo largo de una línea recta. Pero es posible que un objeto se mueva en una trayecto
ria curva o que tenga un movimiento rotacional. Por ejemplo, las ruedas, ejes, poleas, girós
copos y muchos otros dispositivos mecánicos, giran sobre su eje sin que haya movimiento
traslacional. La generación y transmisión de potencia casi siempre depende de algún tipo
de movimiento rotacional. Es esencial que usted sea capaz de predecir y controlar este tipo de
movimiento. Los conceptos y fórmulas que se presentan en este capítulo serán útiles para que
adquiera estas habilidades esenciales.
Desplazamiento angular
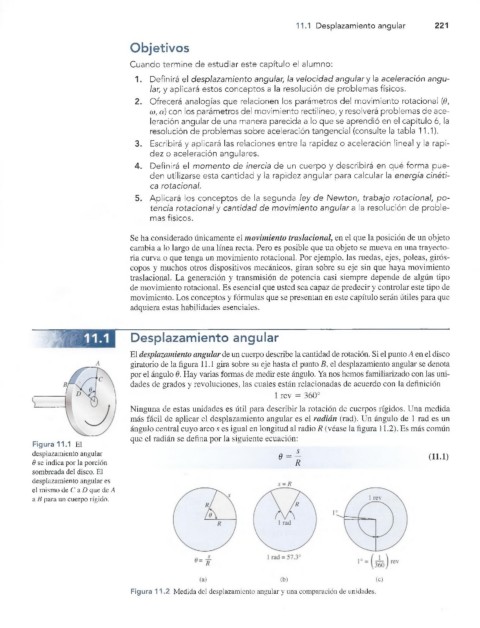
El desplazamiento angular de un cuerpo describe la cantidad de rotación. Si el punto A en el disco
giratorio de la figura 11.1 gira sobre su eje hasta el punto B. el desplazamiento angular se denota
por el ángulo 8. Hay varias formas de medir este ángulo. Ya nos hemos familiarizado con las uni
dades de grados y revoluciones, las cuales están relacionadas de acuerdo con la definición
1 rev = 360°
Ninguna de estas unidades es útil para describir la rotación de cuerpos rígidos. Una medida
más fácil de aplicar el desplazamiento angular es el radián (rad). Un ángulo de 1 rad es un
ángulo central cuyo arco 5 es igual en longitud al radio R (véase la figura 11.2). Es más común
que el radián se defina por la siguiente ecuación:
Figura 11.1 El
desplazamiento angular o - s (11.1)
6 se indica por la porción R
sombreada del disco. El
desplazamiento angular es
el mismo de C a D que de A
a B para un cuerpo rígido.
(a) (b) (c)
Figura 11.2 Medida del desplazamiento angular y una comparación de unidades.